#define GPA1CON 0x11400020
#define ULCON2 0x13820000
#define UCON2 0x13820004
#define UBRDIV2 0x13820028
#define UFRACVAL2 0x1382002c
#define UTXH2 0x13820020
#define UTRSTAT2 0x13820010
#define rGPA1CON (*(volatile unsigned int*)GPA1CON)
#define rULCON2 (*(volatile unsigned int*)ULCON2)
#define rUCON2 (*(volatile unsigned int*)UCON2)
#define rUBRDIV2 (*(volatile unsigned int*)UBRDIV2)
#define rUFBRACVAL2 (*(volatile unsigned int*)UFRACVAL2)
#define rUTXH2 (*(volatile unsigned int*)UTXH2)
#define rUTRSTAT2 (*(volatile unsigned int*)UTRSTAT2)
#define GPX1CON 0x11000c20
#define EXT_INT41CON 0x11000E04
#define EXT_INT41_MASK 0x11000F04
#define ICDISER1_CPU0 0x10490104
#define ICDDCR 0x10490000
#define ICCPMR_CPU0 0x10480004
#define ICCICR_CPU0 0x10480000
#define ICCIAR_CPU0 0x1048000C
#define EXT_INT41_PEND 0X11000F44
#define ICDICPR1_CPU0 0x10490284
#define ICCEOIR_CPU0 0x10480010
#define ICDIPTR14_CPU0 0x10490838
#define rGPX1CON (*(volatile unsigned int*)GPX1CON)
#define rEXT_INT41CON (*(volatile unsigned int*)EXT_INT41CON)
#define rEXT_INT41_MASK (*(volatile unsigned int*)EXT_INT41_MASK)
#define rICDISER1_CPU0 (*(volatile unsigned int*)ICDISER1_CPU0)
#define rICDDCR (*(volatile unsigned int*)ICDDCR)
#define rICCPMR_CPU0 (*(volatile unsigned int*)ICCPMR_CPU0)
#define rICCICR_CPU0 (*(volatile unsigned int*)ICCICR_CPU0)
#define rICCIAR_CPU0 (*(volatile unsigned int*)ICCIAR_CPU0)
#define rEXT_INT41_PEND (*(volatile unsigned int*)EXT_INT41_PEND)
#define rICDICPR1_CPU0 (*(volatile unsigned int*)ICDICPR1_CPU0)
#define rICCEOIR_CPU0 (*(volatile unsigned int*)ICCEOIR_CPU0)
#define rICDIPTR14_CPU0 (*(volatile unsigned int*)ICDIPTR14_CPU0)
#define GPX2CON 0x11000C40
#define GPX2DAT 0x11000C44
#define rGPX2CON (*(volatile unsigned int*)GPX2CON)
#define rGPX2DAT (*(volatile unsigned int*)GPX2DAT)
void uart_putc(char c);
void do_irq(void);
void do_led(void);
int main(int argc, const char *argv[])
{
rGPA1CON &= ~(0xff<<0);
rGPA1CON |= 0X22<<0;
rULCON2 = 0x03;
rUCON2 = 0x05;
rUBRDIV2 = 53;
rUFBRACVAL2 = 4;
rGPX1CON &= ~(0xf<<4);
rGPX1CON |= (0xF<<4);
rEXT_INT41CON &= ~(0X7<<4);
rEXT_INT41CON |= (0X02<<4);
rEXT_INT41_MASK &= ~(1<<1);
rICDISER1_CPU0 = rICDISER1_CPU0 | (1<<25);
rICDDCR |= (1<<0);
rICCPMR_CPU0 |= (0xFF<<0);
rICCICR_CPU0 |= (1<<0);
rICDIPTR14_CPU0 = 0x01010101;
rGPX1CON &= ~(0xf<<8);
rGPX1CON |= (0xF<<8);
rEXT_INT41CON &= ~(0X7<<8);
rEXT_INT41CON |= (0X02<<8);
rEXT_INT41_MASK &= ~(1<<2);
rICDISER1_CPU0 = rICDISER1_CPU0 | (1<<26);
while(1)
{
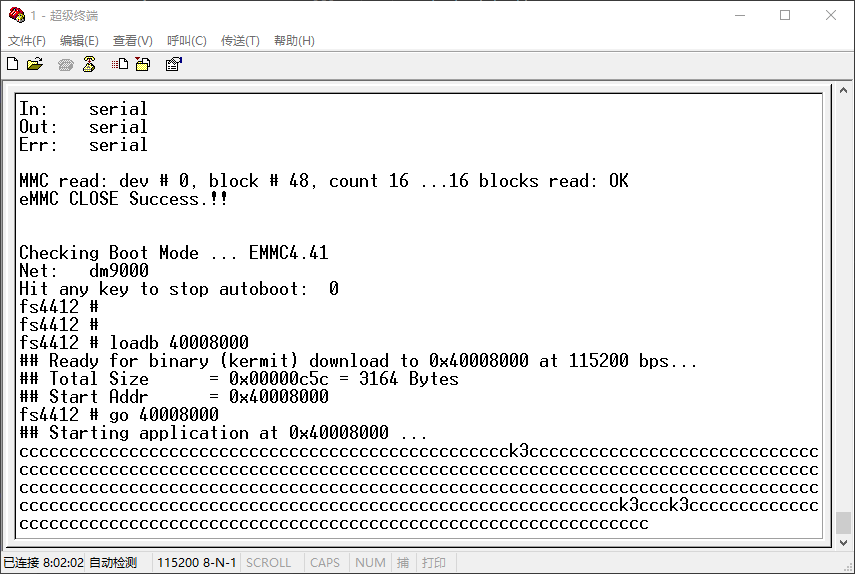
uart_putc('c');
delay1s();
}
return 0;
}
void uart_putc(char c)
{
while(!(rUTRSTAT2&0X02));
rUTXH2 = c;
return;
}
void do_irq(void)
{
int irq_num;
int i;
irq_num = rICCIAR_CPU0&0x3FF;
switch(irq_num)
{
case 57:
do_led();
rEXT_INT41_PEND |= 1<<1;
rICDICPR1_CPU0 |= 1<<25;
break;
case 58:
uart_putc('k');
uart_putc('3');
rEXT_INT41_PEND |= 1<<2;
rICDICPR1_CPU0 |= 1<<26;
break;
default:
uart_putc('x');
break;
}
rICCEOIR_CPU0 &= (~0x3FF);
rICCEOIR_CPU0 |= irq_num;
}
void do_led(void)
{
rGPX2CON &= ~(0xF<<28);
rGPX2CON |= (1<<28);
rGPX2DAT |= (1<<7);
delay1s();
rGPX2DAT &= ~(1<<7);
delay1s();
}
.global delay1s @.C文件要调用delay1s函数,因此要设置成全局函数
.text
.global _start @
_start:
b reset @0x00
ldr pc,_undefined_instruction @0x04
ldr pc,_software_interrupt
ldr pc,_prefetch_abort
ldr pc,_data_abort
ldr pc,_not_used
ldr pc,_irq
ldr pc,_fiq
_undefined_instruction: .word _undefined_instruction
_software_interrupt: .word _software_interrupt
_prefetch_abort: .word _prefetch_abort
_data_abort: .word _data_abort
_not_used: .word _not_used
_irq: .word irq_handle
_fiq: .word _fiq
reset:
ldr r0,=0x40008000 @设置异常向量表的起始地址为 0x40008000
mcr p15,0,r0,c12,c0,0 @ Vector Base Address Register
init_stack:
ldr r0,stacktop /*get stack top pointer*/
/********svc mode stack********/@设置各种模式的堆栈
mov sp,r0
sub r0,#128*4 /*512 byte for irq mode of stack*/
/****irq mode stack**/
msr cpsr,#0xd2 /* 初始化阶段要禁止IRQ,FIQ中断,I位=1,r位=1,mode位=10010 集合到一起就是d2 */
mov sp,r0
sub r0,#128*4 /*512 byte for irq mode of stack*/
/***fiq mode stack***/
msr cpsr,#0xd1
mov sp,r0
sub r0,#0
/***abort mode stack***/
msr cpsr,#0xd7
mov sp,r0
sub r0,#0
/***undefine mode stack***/
msr cpsr,#0xdb
mov sp,r0
sub r0,#0
/*** sys mode and usr mode stack ***/
msr cpsr,#0x10
mov sp,r0 /*1024 byte for user mode of stack*/
b main
irq_handle:
sub lr,lr,#4
stmfd sp!,{r0-r12,lr}
bl do_irq
irq_handle_end:
ldmfd sp!,{r0-r12,pc}^
delay1s: /* 延时1s函数 */
ldr r4,=0x1ffffff
delay1s_loop:
sub r4,r4,#1
cmp r4,#0
bne delay1s_loop
mov pc,lr
.align 4 /* 4字节对齐 */
/**** swi_interrupt handler ****/
stacktop: .word stack+4*512
.data
stack:
.space 4*512
.end
all:
arm-none-linux-gnueabi-gcc -fno-builtin -nostdinc -c -o start.o start.S
arm-none-linux-gnueabi-gcc -fno-builtin -nostdinc -c -o main.o main.c
arm-none-linux-gnueabi-ld start.o main.o -Tmap.lds -o uart.elf
arm-none-linux-gnueabi-objcopy -O binary uart.elf uart.bin
arm-none-linux-gnueabi-objdump -D uart.elf > uart.dis
clean:
rm -rf *.bak start.o main.o uart.elf uart.bin uart.dis
OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm")
OUTPUT_ARCH(arm)
ENTRY(_start)
SECTIONS
{
. = 0x40008000; /*ָ 内存起始地址 */
. = ALIGN(4);
.text :
{
start.o(.text)
*(.text)
. = ALIGN(4);
.data :
{ *(.data) }
. = ALIGN(4);
.bss :
{ *(.bss) }
}